A research purpose
Human desires for expedition in outer space have never been interrupted. Therefore, it is worth pondering how to select the explorers of the advance troops without jeopardizing human life. In recent years, there have been quite a lot of applications in the outer space of biped to multi-foot robots. In the past, biped robots were mostly transitional mechanical systems, and their motion was limited to two-dimensional planes, which could not overcome the rugged terrain of many mountains. The hexapod has the ability to overcome obstacles and overcome the rugged terrain, and the robot can withstand harsh environments than humans, so it can be used in many dangerous jobs, such as volcanic research or other planetary exploration.
The design and improvement of mobile robots have been discussed in depth by many scholars abroad. The general mobile robot can be divided into a wheel shape and a foot shape. In terms of foot-shaped movement, there are two-legged, four-legged, six-legged and multi-footed robots, as well as serpentine mobile robots.
Whether moving at rest or walking, the movement of the hexapod is more flexible, but its walking control requires good control and planning. The hexapod is less restricted by terrain. Moving around is a tool for exploring the unknown environment. It is a good research theme.
Second system overall plan
The hexapod bionic robot is divided into two parts: a robot module and a wireless remote control module. Their block diagram is shown below. Both modules use the PIC32 microcontroller as the control core to realize various functions by simulating the button control robot on the 2.8-inch TFT screen.

Figure 1, hexapod robot module

Figure 2, wireless remote control module
Three hardware design
3.1 Robot gait study
a. Pre-progressive state (black ellipse means the bottom of the foot, hollow ellipse means no ground)


Figure 3. Initial state Figure 4. The three legs of the first group are lifted up.


Figure 5. The first group of three feet move forward. Figure 6, the second group of three feet lifted up.


Figure 7. The three legs of the first group use the ground on the ground. Figure 8. The three feet of the second group touch the ground.
Friction will move forward in the future, and the third set of three feet will move forward.
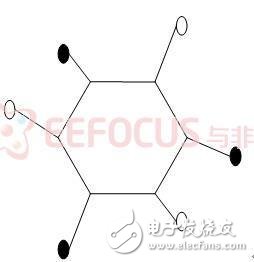
Figure 9. The three legs of the second group use the friction to the ground to move the body forward. The three legs of the first group move forward, and then from Figure 4.
Start the repetitive execution to achieve the advance and retreat gait of the robot.
Note: In order for the robot to move in a straight line, the distance must be the same for each foot.
b. Turning gait
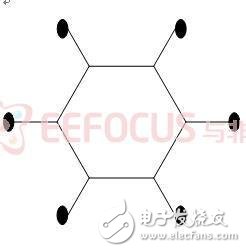

Figure 10, initial state Figure 11, the first set of three feet lifted up
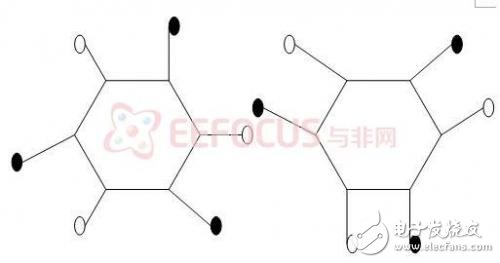
Figure 12. The three legs of the first group turn and step on. Figure 13, the three feet of the first group use the friction against the ground.
On the ground, then the three legs of the second group are lifted up to force the robot to bend a certain angle, and the three legs of the second group turn at a certain angle.
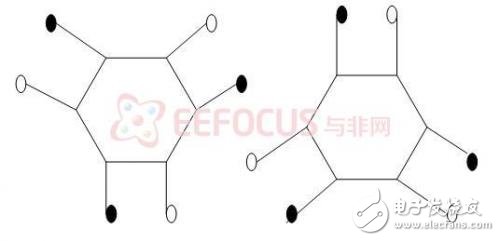
Figure 14. The three legs of the first group are lifted up. Figure 15, the three legs of the second group use the ground.
Furniture Sofa And Mattress Staple
Zhejiang Best Nail Industrial Co., Ltd. , https://www.beststaple.com