Designing a robot that can hunt, punch and implement the pitching function in the process requires the support of sensor technology. In the experiment, three infrared sensors and one light sensor are installed in the whole structure of the robot. Here, the sensors are mainly analyzed. A summary of the actual application.
This paper mainly introduces the single-chip ATmega16 as the core of the intelligent control system. In the mobile robot system, the light sensor is used to realize a series of behaviors of the robot to the obstacle. The infrared sensor is used to realize the line hunting of the black rubber strip during the moving process. The process of turning.
1. Application of infrared sensor
Infrared sensors are generally composed of optical systems, detectors, signal conditioning circuits and display units. Infrared detectors are the core of infrared sensors. They use the physical effects of infrared radiation interacting with matter to detect infrared radiation. Any object in nature can generate infrared radiation as long as the temperature is higher than absolute zero, and the lower the infrared wavelength of the object with lower temperature, the selective acceptance of the wavelength within a certain range by adjusting the size of the halo as needed. The purpose of the measurement can be achieved, and the infrared sensor can convert the change in the amount of infrared radiation into a change in the amount of electricity.
The SHARP electric infrared sensor we used in this experiment is simple in production, low in cost, convenient in installation and stable in performance, but its accuracy is reduced due to long-term use.
In the robot's travel, we can automatically travel along the established route by means of the infrared sensor and the ribbon trajectory on the floor. The path can be arbitrary. Because our robot is displayed outdoors, the robot may be affected by visible light in the natural environment when identifying the path. The light sensor is not recognized accurately, and the infrared sensor can filter out various light under natural light conditions, which can greatly increase the accuracy of the feedback value.
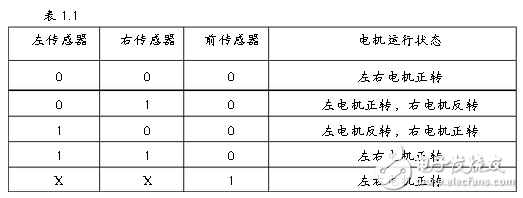
Because our trajectory is black and the sides are white, the sensor on the left controls the right motor and the sensor on the right controls the left motor. Assuming that the vertical axis of the vertical axis of the robot deviates to the left of the black track line, the photocell of the right sensor detects that the track line is reflected back, the output of the sensor is high, and the left sensor remains in the original state, and the output is low. level. By comparing with the values ​​in the program (see Table 1.1), the result of feedback should be that the left motor rotates forward and the right motor reverses, causing the body to rotate in the opposite direction (the angle can be controlled by the program, and the smaller the angle, the travel The more precise the process, the smaller the time pauses, so the direction of the deviation can be corrected. In the correcting path, the two motors alternately work, and the robot actually runs in a zigzag shape in front of the trajectory. The third sensor on our robot is used as a punching device. Its priority is higher than the other two. When it feeds back a high level, the feedback signals of the other two sensors are directly shielded, and the robot runs straight out. The finish line.
Because of the third sensor priority problem, we redesign the structure and angle design, and we need to constantly modify it in the experiment to achieve the most satisfactory accuracy.
2. Photoelectric sensor
The light-sensing sensor is a photoelectric-based sensor that generates a photoelectric effect after receiving visible light irradiation, and converts the optical signal into an electrical signal output. The photoelectric sensor is generally composed of a light source, an optical path and a photoelectric element. Light intensity, light occlusion, transmission, reflection, etc. measure a variety of physical quantities, such as size, displacement speed, temperature, etc., and therefore this is an extremely sensitive and sensitive device.
We applied a reflective photoelectric switch in the experiment, which has two susceptors at one end of the photoelectric device, one is the transmitter and the other is the receiver. If there is no obstacle in the extended range of the transmitter, no feedback will be generated. In the low state, the robot arm of the robot will remain in the original state; when obstacles are blocked in the direction, it will be Light is formed between the sensor and the obstruction and is fed back to the receiver. The photometer generates a pulse feedback back to the cpu, causing the arm to act.
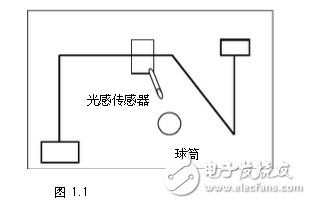
During the robot's travel, considering that the robot arm will generate a certain time delay when performing a series of actions, we tilt the photoelectric sensor forward at a 45-degree angle to sense the cylinder in advance, when the light sensor senses the shield. The robot arm reverses and puts the small ball in the claw into the cylinder to complete the pitching action. (Figure 1.1)
In the constant experimental measurement, we constantly adjust the height of the arm, the angle of the light sensor, and the distance between the shield to achieve the best measurement effect, so that the small ball can be accurately invested, and try not to slow down the car. speed.
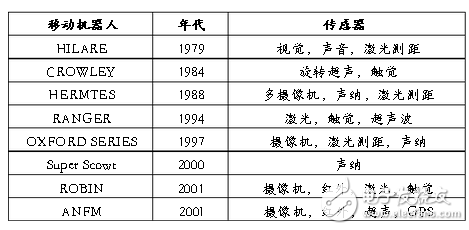
The above two are just the use of sensors in the production of simple mobile robots, and many different types of sensors are used in actual laboratory creation. Robot is a very wide range of disciplines involved in technology. Sensors and control technology are the core technologies. Therefore, the existence of sensors can be seen in most robot applications. Therefore, multi-sensor information fusion technology has a broad field in the field of robotics. Application prospects. The most prominent ones should be the autopilots of various movable objects or environments designed by many research institutes in order to explore the general rules of multi-sensor data fusion. I searched the Internet for some of the more famous works of multi-sensor fusion.
Compared with the single sensor signal processing system, the multi-sensor information fusion system can effectively utilize the sensor resources and obtain the information of the target and the environment to a greater extent. There is also a fundamental difference between multi-sensor information fusion and single-sensor signal processing methods. The key point is that the multi-sensor information processed by information fusion has a more complicated situation and can appear at different information levels.
The basic goal of multi-sensor information fusion is to separate the observation information based on each sensor, and to derive more effective information through the optimized combination of information, which is the result of optimal synergy. Its ultimate goal is to take advantage of the joint or joint operation of multiple sensors to increase the effectiveness of the entire sensor system.
The application of multi-sensor information fusion technology in mobile robots has now developed into a hot research field, providing a technical approach for mobile robots to explore uncertain and unknown environments. The mobile robot is a multi-disciplinary cross-development field. Nowadays, only the lower-level robot hardware and software are designed. These theories and results need to be improved in the future. In addition, there are still many problems that need to be further studied.
Fixed panel, FM electronic tuning radio
With USB mobile hard drive socket, SD card slot, compatible with MP3/WMA music format
Electronic volume control, color screen or LED or LCD display with external auxiliary audio interface
Audio output, pre-stored 18 radio stations, built-in electronic clock, pause-repeat-random radio radio search radio station/automatic storage radio function, loudness and mute function
Electronic digital song function, USB mobile phone charging, memory playback function, power supply: 12V or 24V
Optional features:
AM electronic tuning radio (plus 12 radio stations), sound adjustment: equal ring / bass / treble / balance
Audio playback effect: pop-rock-classic-jazz, with folder function, ID3 function, with Bluetooth maximum power output: 4*15W/4*25W/4*45W, with remote control
Fixed Panel,High Quality Fixed Panel,Fixed Panel Details, CN
Jiangmen soundrace electronics and technology co.,ltd. , https://www.soundracegroup.com