In recent years, the transportation authorities of all countries in the world have vigorously advocated "defensive driving." The so-called defensive driving is a mechanism for predicting the crisis and helping to stay away from the crisis. It means that in addition to the driving itself obeying the traffic rules, it must also guard against other driving because of its own A traffic accident occurred in the event of negligence or intentional violation. Therefore, the purpose of defensive driving is to recognize and predict the situation of possible accidents through visual and auditory hearing, and take necessary defense measures as soon as possible to avoid accidents.
This article refers to the address: http://
According to the long-term statistics and characteristics analysis report of the Ministry of Communications, among the major traffic accidents in the country, the “safe distance not maintained†is the most. Taking the National Highway in the first half of 2014 as an example, there are a total of 30 traffic accidents in the A1 category (causing personnel to be on the spot or within 24 hours), while the safety distance (in front of the vehicle) is the largest, with a total of ten. And caused 11 deaths and 13 serious injuries. Secondly, the change of the lane was improper, totaling six pieces, and caused eight deaths and eight serious injuries. In fact, the Ministry of Communications pointed out in the 2012 National Road Accident Review Report that up to 79.1% of these unfortunate traffic accidents have the opportunity to be prevented in advance.
In view of this, major car manufacturers and drivers have installed various driver assistance systems on their vehicles to reduce the accident rate (Figure 1). In various systems, image-based assisted driving systems have the highest market share; the main reason is low cost, and can be combined with driving recorders, and can display the results of detection to the visual and audio-visual People, although their detection distance is not as good as infrared and radar, they are still very popular.
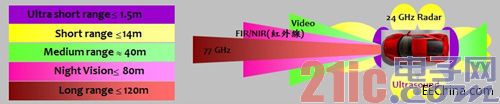
Figure 1 Various different forms of ADAS sensors
Low-cost imaging ADAS is favored
In order to effectively reduce the accident caused by the driver's lack of concentration, the Lane Departure Warning System (LDWS) and the Forward Collision Warning System (FCWS) are valued by the world. Developed two of the premier Advanced Driver Assistance System (ADAS) features.
.LDWS
The main function of LDWS is to capture the scene in front of the vehicle through the camera, and then generate image detection and calculation to generate the result of lane detection. Once the vehicle starts to shift the lane without the directional light, the system will automatically issue each Kind of warning signal to remind the driver to react immediately to avoid accidents.
.FCWS
The main function of FCWS is to capture the scene in front of the vehicle through the camera. After the calculation of the image processing algorithm, the vehicle in front is detected and the distance between the two vehicles is estimated. When the two vehicles do not maintain the proper driving distance. At the time, the system also automatically warned the driver that even in recent years, the car manufacturer has begun to assess whether the driving computer system takes over the braking function.
The main function of the above two ADASs, the common feature is to capture the scene information in front of the vehicle. In general, both FCWS and LDWS use the image information obtained by the same camera, and the camera can also store the image information as a driving recorder. Therefore, in addition to the development research of existing automakers, FCWS and LDWS are also actively investing in R&D.
PC-based is an early custom platform
Digital image processing platforms can be divided into two major categories, software-oriented PC-based and hardware-oriented Stand Alone platforms; each has its own advantages and disadvantages. In the early days, due to the limitations of independent system computing resources, the central processing unit (CPU) has a slower instruction cycle, insufficient memory space, and a shortage of supported interface devices. In addition, the lack of an effective image program development interface leads to image processing algorithms. Developers are accustomed to using PC-based as a hardware platform. Now, due to advances in very large scale integrated circuits (VLSI) and system-on-a-chip (SoC), digital system chips have made significant progress and shrinking progress, enabling current embedded systems to provide high-speed CPUs at low cost. , massive memory, more peripheral control, and even multi-core processors.
Stand-alone platform meets the needs of light, thin and short design
With such progress, embedded systems have begun to move toward multimedia, adding two-dimensional (2D)/three-dimensional (3D) signals such as video and video to expand the range of applications; coupled with the trend of intelligence and cloudization, Multimedia applications and security monitoring platforms have gradually moved from PC-based to stand-alone embedded systems to meet the power-saving and light-weight requirements of automotive applications.
In view of this, ITRI has developed and validated ADAS in a stand-alone embedded system. First of all, the algorithm developer develops an algorithm for obtaining images. In the early stage of development, it is necessary to drive a vehicle equipped with a driving recorder to shoot various scenes, weather and other driving movies on the road. In the process, the "correct rate" must be taken into account. "Efficiency", because for any algorithm, good accuracy is only the most basic condition.
Shaoguan warning prompt speed ADAS algorithm verification is important
ADAS is inevitable for the performance of the algorithm, because when a dangerous situation occurs, the system must issue a warning in real-time. Take FCWS as an example. When a vehicle is driving at a speed of 100 kilometers per hour on the National Highway, that is, it advances 27.7 meters per second. If the system delays 0.1 seconds to issue a warning, the vehicle will continue to advance 2.77 meters; therefore, the designer is used to Frame Per Second (FPS) is used to verify the performance of the algorithm in ADAS. When the FPS value is larger, the performance of the algorithm is better.
Of course, the performance of the algorithm must be related to the processor speed and resources of the embedded platform. Therefore, in the initial stage of development, it must be considered which embedded platform the algorithm is suitable for, otherwise there will be a dilemma that the algorithm has no suitable platform available.
Combined with fast image segmentation, the lane detection algorithm is robust
LDWS is an early development of the ADAS function. The development of the lane offset warning system mainly includes two items: lane lane detection and lane offset detection. Although this research has been in existence for more than a decade, and many well-known scholars have invested in this field, there are still many areas for improvement in its research; for example, in lane detection, because lane lines and roads cannot be predicted. The degree of color difference (Gradient). Therefore, the default parameters in the algorithm cannot detect all types of lane lines. In addition, in order to enhance the characteristics of the lane line, it is often necessary to overlap a plurality of consecutive pictures to lengthen the length of the lane line.
Finally, due to the use of the line detection algorithm, it is not possible to provide information such as whether the line belongs to a lane line or a non-lane line. Therefore, the conventional lane shift system requires a manually set screen to indicate the possible lane line area. Filter out non-lane routes.
In the aspect of lane offset detection, it is necessary to analyze the change of the continuous picture to determine whether the car is offset. As a result, the system cannot notify the driving information about the lane offset in real time. In view of this, ITRI has developed a fast and robust lane offset warning system. By combining the results of “fast image segmentationâ€, the developed lane detection algorithm can detect various types. The lane line does not need to analyze the change of the continuous picture, and it can be judged whether the vehicle is offset by only one picture.
The execution flow of the algorithm (Figure 2) has five main steps.
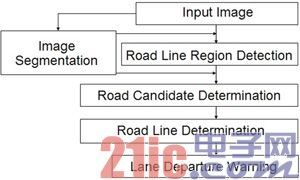
Figure 2 LDWS algorithm flow chart
Image Segmentation
First, the process of "regionalizing" the original image divides the image into several regions.
.Road Line Region Detection
Then combine the "image segmentation results" and "gradient analysis" to complete the lane line area detection.
.Road Candidate Determination
Use the Connected Component Labeling method to mark each connected area (Connected Component), and then analyze the characteristics of each area to remove the "non-lane line area" to complete the work.
.Road Line Determination
Then, the lane line determination step is performed.
Lane Departure Warning
Finally, the function of the warning is completed by judging the angle of the left and right lane lines.
The execution result of the algorithm can be referred to FIG. 4.
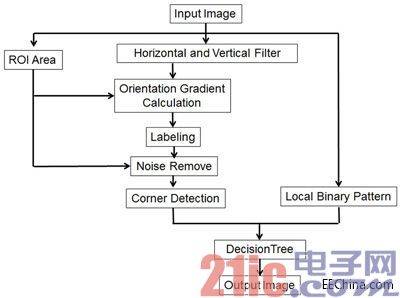
Figure 3 FCWS algorithm flow chart
Precise detection algorithm based on pure horizontal line is more accurate
Maintaining a safe distance is the basic code for driving, especially on the highway. When there is any situation in the current vehicle, it is sufficient to maintain a safe distance for defensive driving. Therefore, the goal of ITRI to develop FCWS is to send a warning signal in real time when the current vehicle is 30 meters away from its own vehicle.
The development of the front collision warning system mainly includes two items: "front vehicle detection" and "vehicle distance calculation". In the current front vehicle detection study, there are many ways to use "bottom shadow" as a feature value. However, shadows are susceptible to external light, causing instability in detection accuracy. In addition, in order to overcome the weather problems such as nighttime and rainy weather, there are many methods for detecting the characteristic values ​​of "rear lights". Although this approach can achieve good results at night, it is only suitable for nighttime.
In view of this, ITRI has developed its own vehicle detection algorithm for embedded systems, which is fast and stable. The Sobel filter is used to obtain the horizontal and vertical edges of the vehicle ahead, and through the Gradient Orientation. The pure horizontal edge is taken out.
"Pure horizontal edge" is a very important feature, because it can be observed from many test films that the front vehicle must have "pure horizontal edges", such as bumpers, rear windshield, luggage, etc., but sometimes the scene is also There may be some pure horizontal edges that are not vehicles. To avoid false positives, you can use the Labeling, Corner Detection, and Local Binary Pattern (LBP) Texture Analysis to accurately detect the vehicle in front. Like the LDWS algorithm, the forward vehicle detection system of the algorithm does not need to analyze the changes of the continuous picture, and the vehicle in front can be judged from only one picture. The execution flow of this algorithm is shown in Figure 3, and the execution result is shown in Figure 4.
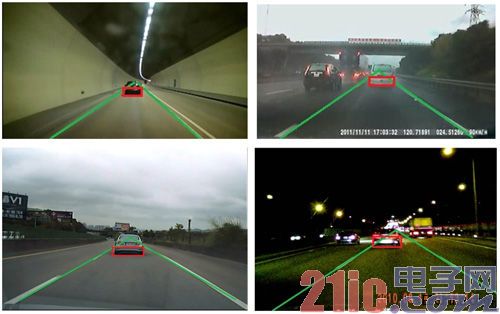
Figure 4 FCWS and LDWS execution results
In terms of distance calculation, since there is only a single camera, it is impossible to calculate the distance using the algorithm of the dual camera; but by means of a fixed camera, the distance is measured in a static state, and a corresponding table is established for calculation (Fig. 5). After the camera is fixed and erected, the actual measurement shows that the 5 metre line corresponds to the 162th column (Row) of the image, the 10 metre column corresponds to the 137th column, and the 15 metre column corresponds to the 126th column and the 20th column. Ruler is the 123rd column.

Figure 5 Single camera front distance measurement
A correspondence table is generated by the correspondence between the actual distance and the image coordinates. When the vehicle ahead is detected, the distance of the preceding vehicle is converted by means of a look-up table. With the method corresponding to the image coordinates, the error value will increase with the increase of the distance. However, under the condition of controlling the camera lens, when the actual distance is less than 30 meters, the error value is still within the acceptance range of the metric level.
Finally, after the ADAS is verified on the embedded platform and the program is optimized, it can be installed on the vehicle for real vehicle testing. The embedded platform used here is the Cortex-A15 dual-core processor and other related peripherals; the test scene is the Hsinchu 68 expressway, and several real-time tests are conducted in the morning, noon, and evening; It includes sunny, cloudy, and heavy rain. The correct rate of FCWS and LDWS is at least 90%, and the execution speed can reach 25FPS.
Advance driving technology has progress, active ADAS prospects can be expected
With the advancement of automotive electronics and automotive imaging technology, various assisted driving systems have become the development goals of major automakers, and they are constantly evolving. Therefore, the strength and energy of the automakers to develop various active ADASs is getting stronger and stronger. . However, most of the early ADAS stayed in the warning function to remind drivers to take defensive driving as soon as possible. However, in recent years, some car manufacturers have introduced semi-automatic auxiliary systems to assist drivers in braking or lane maintenance.
The ultimate goal of developing these functions is to drive towards full-automatic driving. When a crisis occurs on the road, the system will take the initiative to take over the driving and quickly determine how to avoid the danger and keep the car body from colliding. It is the key to future development; however, during this transition period, the factories are still committed to the development of related technologies, and various single-function warning support systems are booming in the industry. In the future, when the technology is mature and the cost can be accepted by the market, it is believed that the major automakers will integrate multiple single warning systems and gradually move toward driverless driving.
At present, Google has made great progress in autonomous vehicles. The autonomous vehicles announced in 2014 have no steering wheel and throttle, and are tested in California in the United States at a speed of 40 km / h. In fact, the biggest challenge for driverless vehicles is still on the general road, as Chris Umson, head of the Google Autopilot program, said that the unmanned system is 1 km on the highway and 1 km in the urban area. This is a completely different thing; there are only a few reasons for driving on the highway, but if it is on the general road, it will probably increase to hundreds. Therefore, in addition to the traditional camera, the Google driverless car is equipped with a light-darling system (LiDAR) for optical directional ranging to improve safety and reliability. As technology, laws and other factors are not yet mature, driverless cars cannot be listed in a few years. However, through the continuous advancement of autonomous driving technology, the relevant equipment must be decentralized to the general car models, which is also a big Gospel.
LED street lights achieve ultra brightness/luminance; energy-saving over 70%. Special modular design for theLens (independent modules) and high luminous efficacy, high CRI, easy for maintenance.Intelligent and isolated power supply (NS semiconductor and Japan Rubycon capacitor), reliable and stable; automatically reduce current against overheating working temperature
Single Arm Led Street Light,Solar Lighting Street,Led Street Light Module
Yangzhou Beyond Solar Energy Co.,Ltd. , https://www.ckbsolar.com